首页
授课信息
论文成果
科学研究
研究领域
科研项目
论文成果
专利
著作成果
教学研究
教学成果
授课信息
教学资源
获奖信息
招生信息
学生信息
我的相册
教师博客
扫描手机二维码
欢迎您的访问
您是第
位访客
最后更新时间 :
.
.
English
|
手机版
!tvu.isPriviewMode()true showstate0
冯美
!tvu.isPriviewMode()true showstate0
( 教授 )
赞
!tvu.isPriviewMode()true showstate0
的个人主页 https://teachers.jlu.edu.cn/MeiFeng/zh_CN/index.htm
!tvu.isPriviewMode()true showstate0
教授
!tvu.isPriviewMode()true showstate0
性别 :
女
毕业院校 :
哈尔滨工业大学
学历 :
博士研究生毕业
学位 :
博士
在职信息 :
在职
所在单位 :
机械与航空航天工程学院
学科 :
机械制造及其自动化
办公地点 :
吉林大学机械学院
科学研究
当前位置:
中文主页
>>
科学研究
研究领域
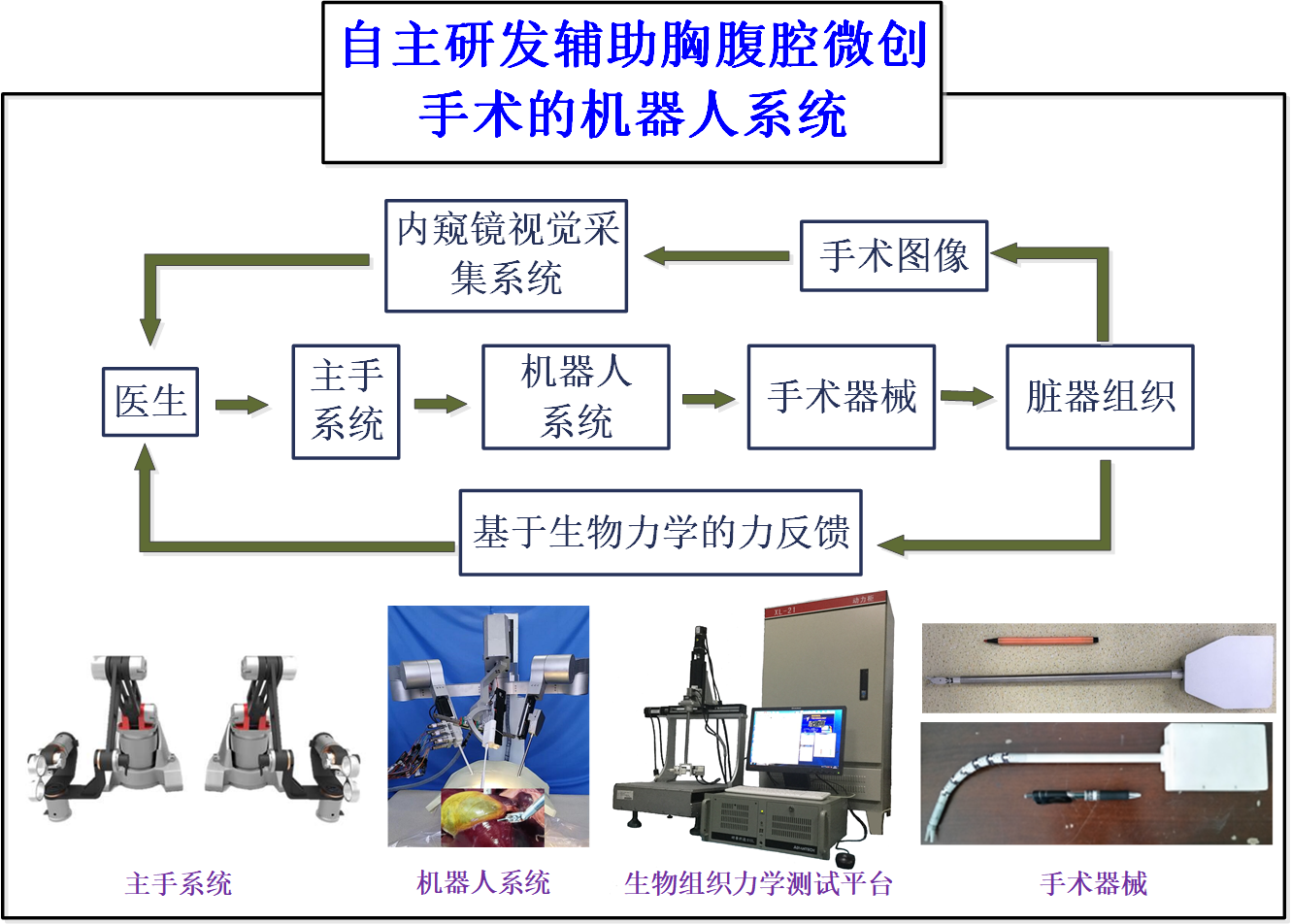
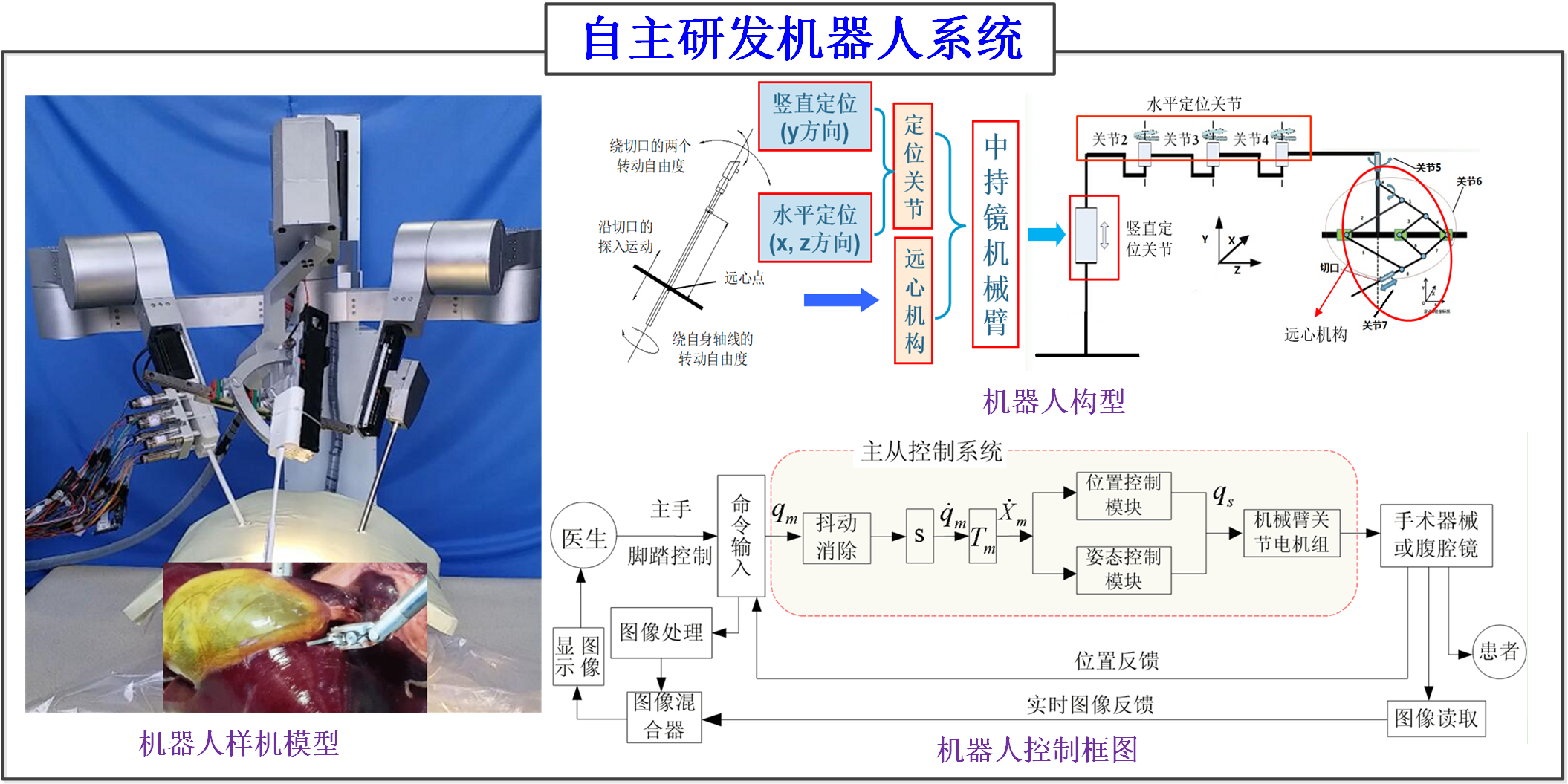
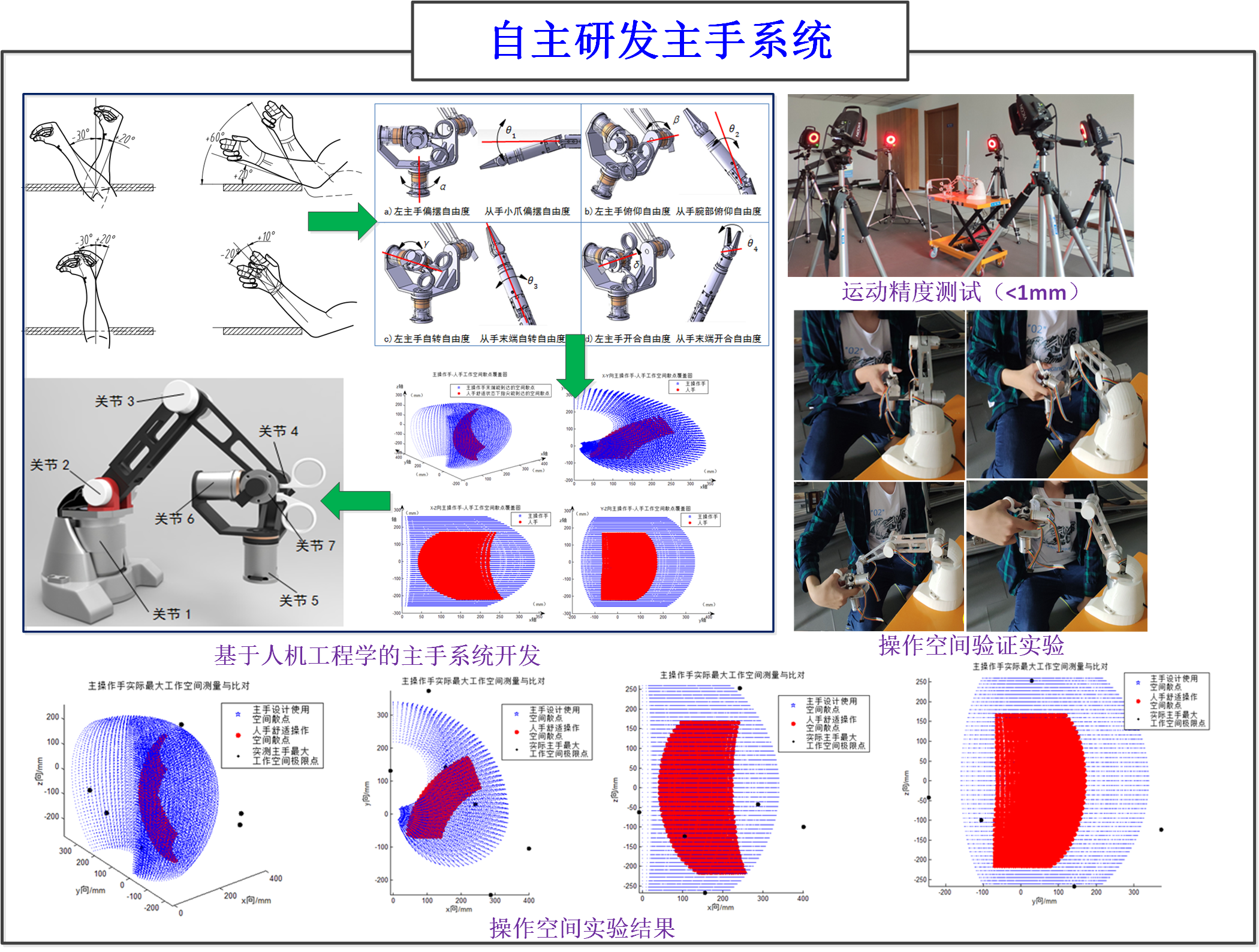
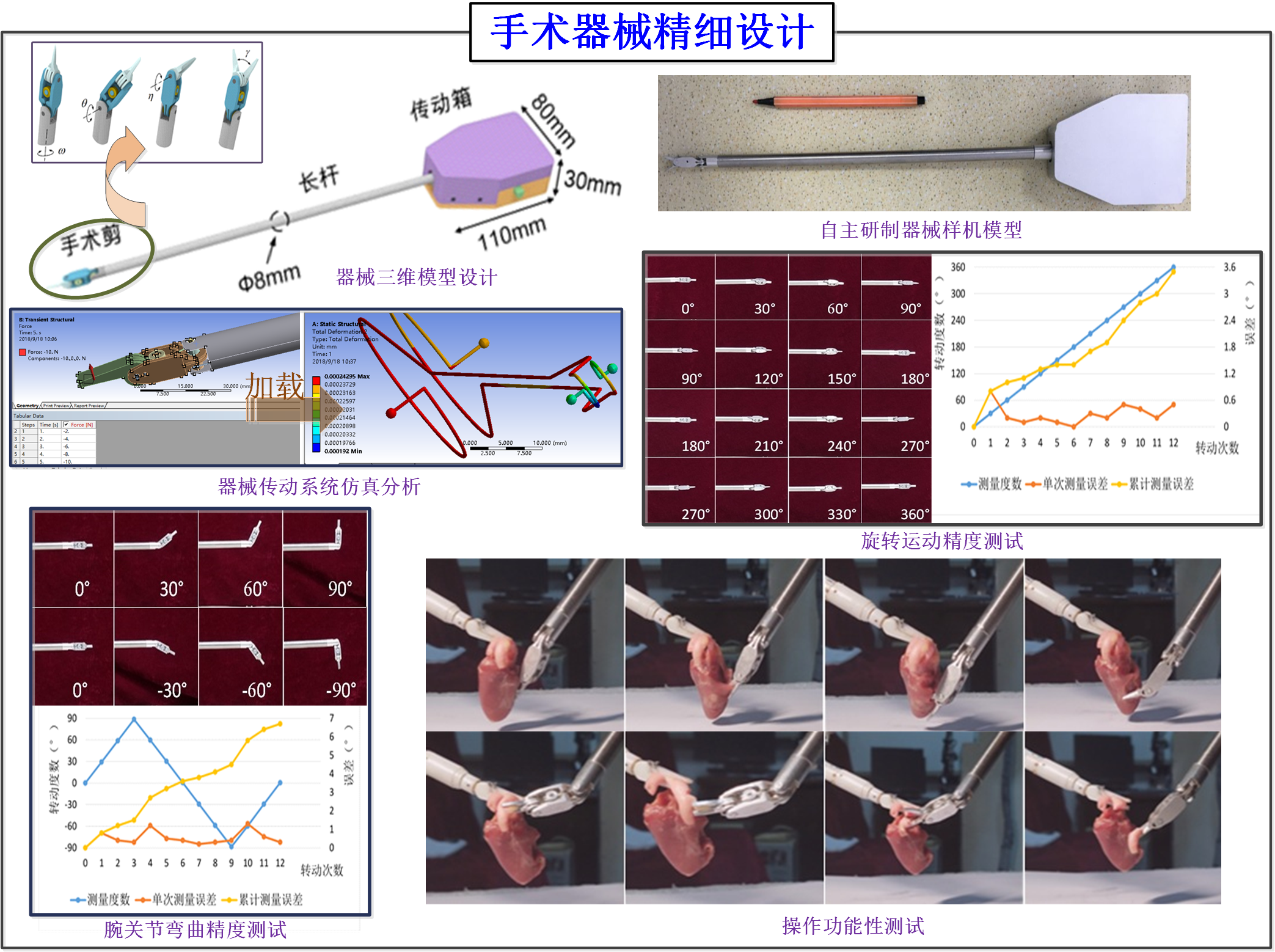
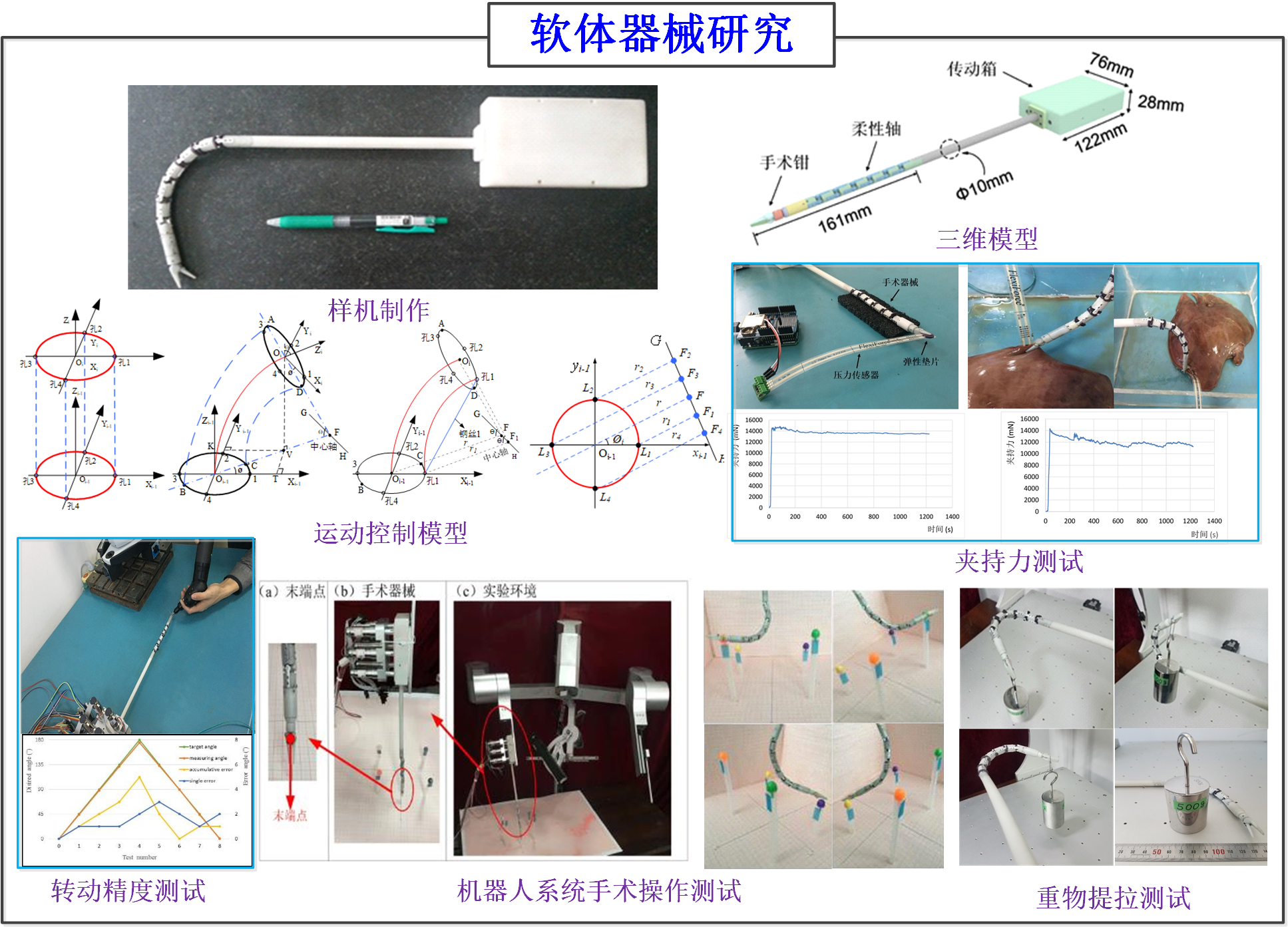
研究领域:机器人
智能控制
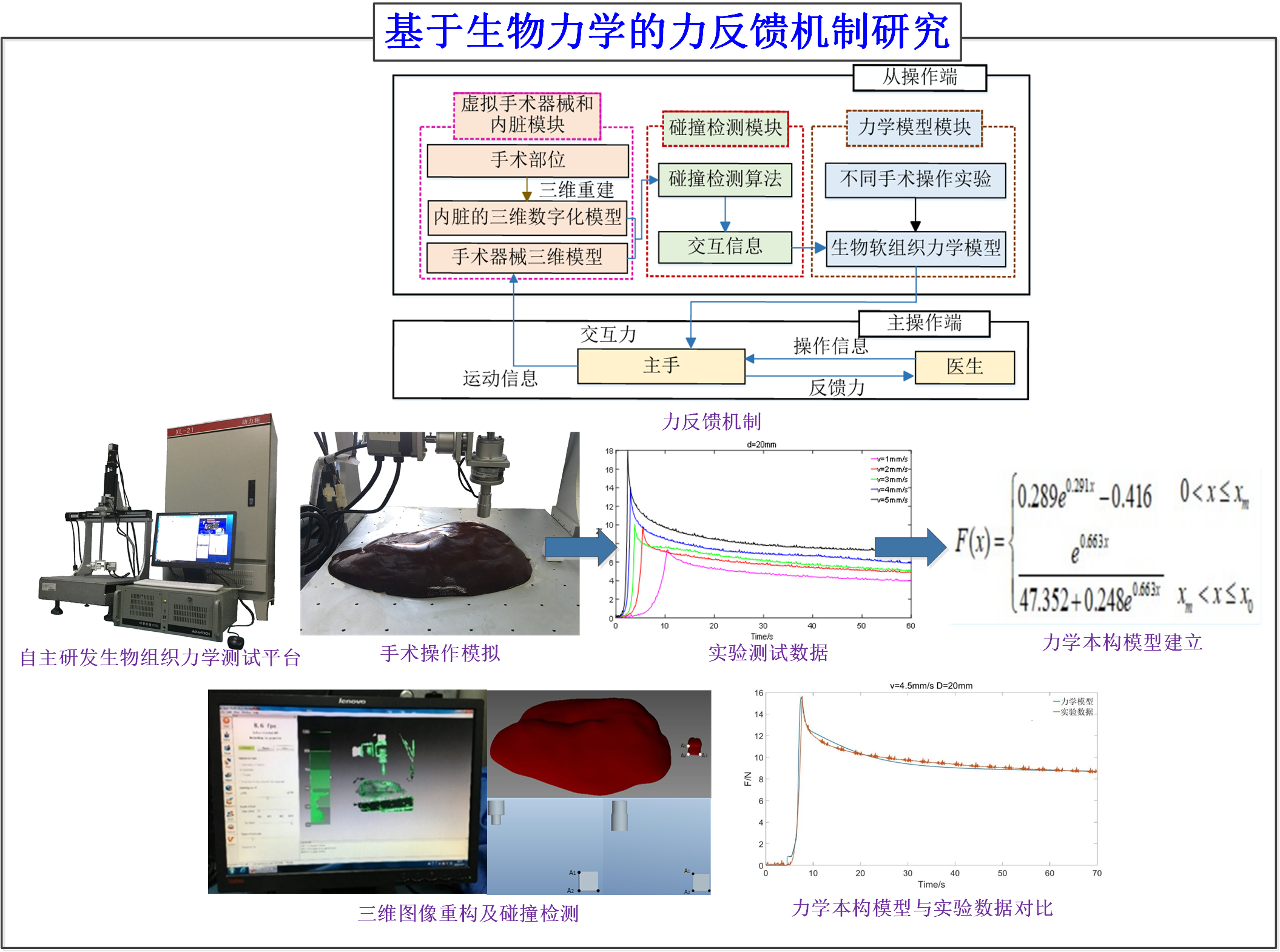
,精细设计,智能传感,生物力学,图像处理等研究工作。
科研项目
More>>
国家自然科学基金:基于生物力学的机器人辅助微创手术力反馈技术研究
国家自然科学基金:面向微创外科非决策手术任务的机器人自主手术研究, 研究机器人智能控制,自主作业
吉林省优秀青年人才基金项目:机器人辅助微创手术用手术器械研究, 地、市、厅、局等政府部门项目
吉林省科技厅重点研发项目:用于微创手术的诊疗一体式软体机器人系统研究
教育部基金:机器人辅助微创外科虚拟手术系统研究
国家重点实验室基金:胸腹腔微创手术机器人力反馈研究, 其他研究项目
论文成果
More>>
A medical robot system for celiac minimally invasive surgery
Design and implementation of a medical robotfor celiac minimally invasive surgery
An improved surgical instrument without coupled motions that can be used in robotic-assisted minimally invasive surgery
Development of a medical robot system for minimally invasive surgery
Singular Configuration Analysis for the Structure of Hybrid Grinding and Polishing Machine
Design a flexible surgical instrument for robot-assisted minimally invasive surgery
专利
More>>
一种用于胸腹腔微创手术的手持式柔性多关节手术器械 专利号:201710959357.6
一种机器人辅助微创手术用柔性多关节手术器械 专利号:201710661193.9
一种多自由度集成一体化的单孔腔镜手术器械 专利号:2019100640918
一种具有自锁与快速更换功能的手控式柔性微创手术器械 专利号:201810084985.9
一种具有自锁性的手持式微创手术器械 专利号:201710962057.3
一种具有快速更换功能的微创手术器械末端执行器 专利号:201721705566.X
著作成果
地址:吉林省长春市前进大街2699号
信息管理和技术维护:吉林大学大数据和网络管理中心
版权所有 2017 吉林大学 吉ICP备06002985号-1


 赞
的个人主页 https://teachers.jlu.edu.cn/MeiFeng/zh_CN/index.htm
赞
的个人主页 https://teachers.jlu.edu.cn/MeiFeng/zh_CN/index.htm