
学位:博士
性别:男
毕业院校:吉林大学
学历:博士研究生毕业
在职信息:在职
所在单位:机械与航空航天工程学院
电话(微信):
通讯地址:
邮箱:
崔达,副教授,英国利兹大学机器人研究所联合培养博士,博士后,吉林省E类高层次人才。先后主持吉林省科技发展计划重点研发项目1项、吉林省自然科学基金联合基金项目1项、国家科技重大专项子课题等科研项目,参与国家自然科学基金项目、山西省揭榜招标项目和企业委托项目等课题共10余项。在Reliability Engineering & System Safety、Journal of Cleaner Production、Journal of Bionic Engineering、Bioinspiration & Biomimetics、Powder Technology等国际高水平期刊上发表论文10余篇并担任审稿专家。
主讲课程:
《机械原理》(本科生)
《工程学导论》(本科生)
研究方向:
[1]多学科优化设计
[2]仿生机器人
[3]工程装备智能控制
科研项目:
吉林省科技发展计划(重点研发):向汽车回转零部件的可重构全自动平衡机关键技术研究,2023~2025,主持
吉林省自然科学基金(省地合作基金):模块化田间自主作业机器人集群系统关键技术研究,2024~2026,主持
企业委托(横向):用于果蔬温室的自主机器人通用移动平台系统开发,2025~2026,主持
国家自然科学基金:大型矿用磨机虚实融合交互机理与智能状态监测技术研究,2024~2028,参与
国家自然科学基金:非结构环境下工程车辆自主作业关键技术研究,2019~2022,参与
学术成果(论文):
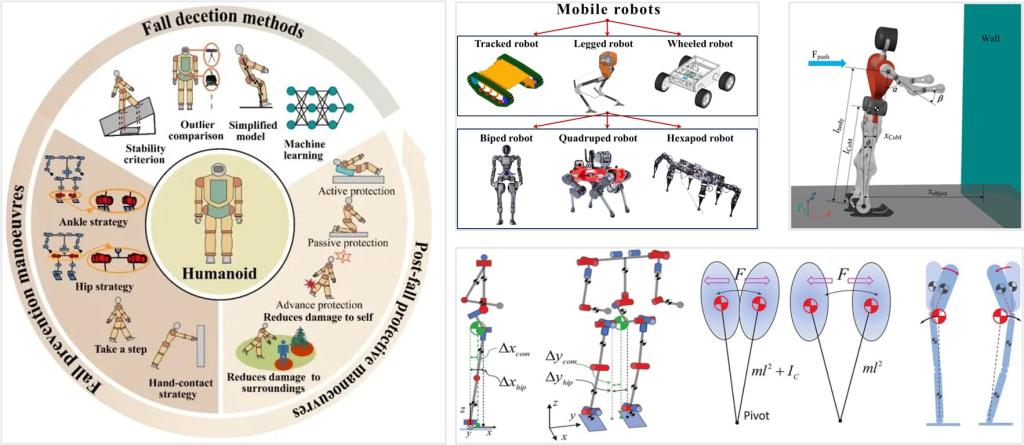
[1] Zhang, Haoyan, Wu Jiaqi, Fan Jiarong, An Yang, Jin Xingze, Cui Da*, Yang YiRu. A Review of Fall Coping Strategies for Humanoid Robots. Journal of Bionic Engineering (2025): 1-33. (D刊)
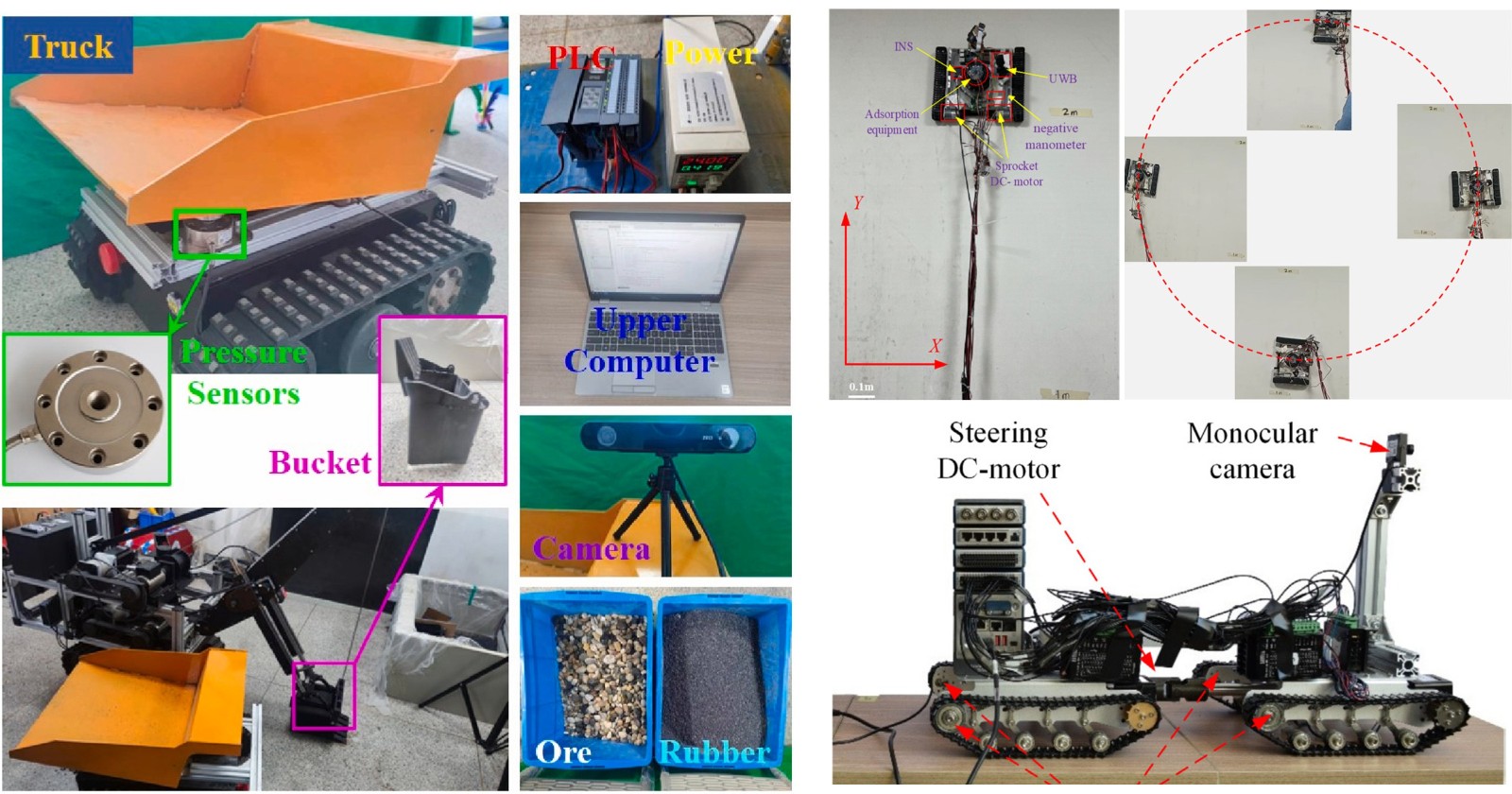
[2] Wu Guohua, Li Xuefei, Yao Zongwei, Cui Da *, Guan Wei, Wang Zi, Zheng Hewen, Wang Yongpeng. Accuracy Evaluation of Load Distribution in Engineering Vehicles Under Extreme Environments. Journal of Cleaner Production, 518(2025): 145887. (1区,D刊)
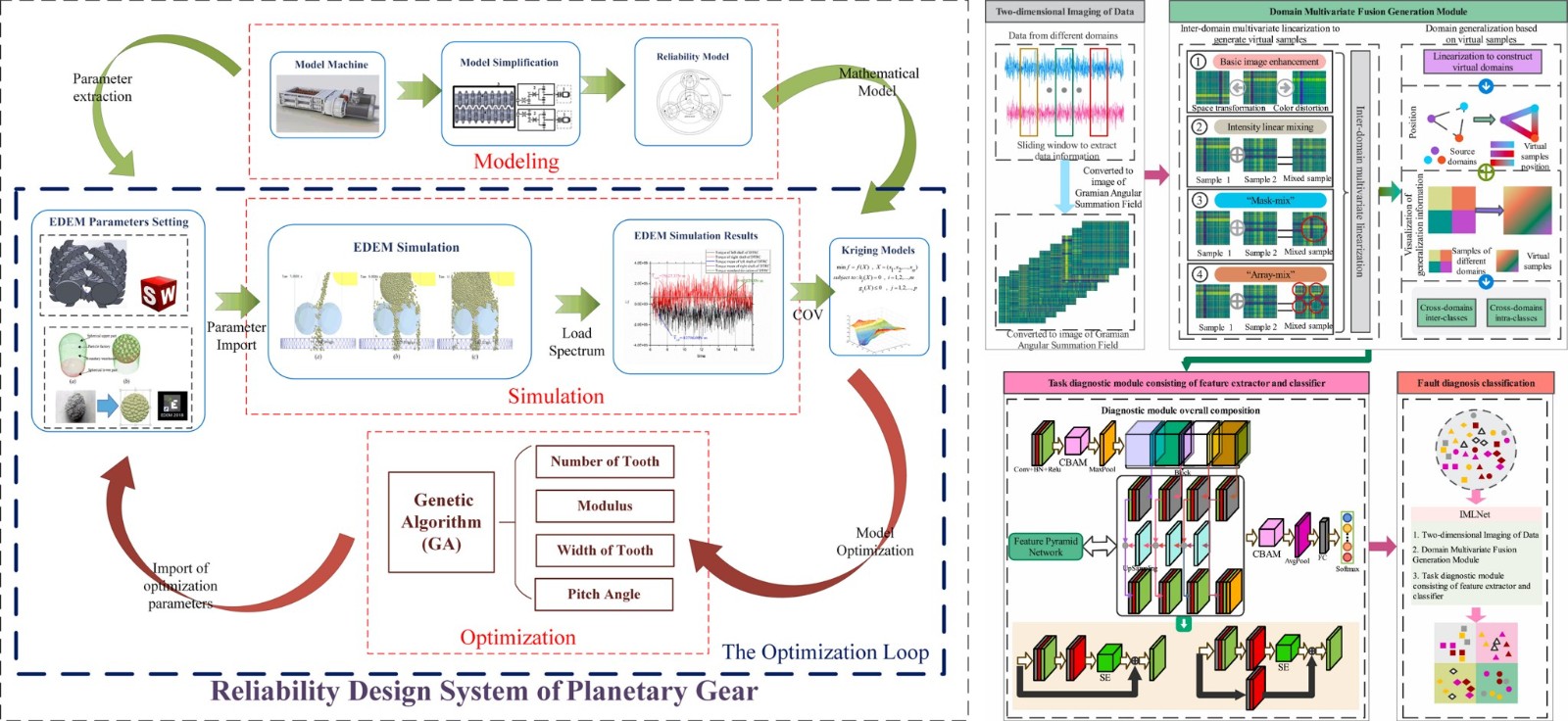
[3] Guan Wei, Wang Shuai, Chen Zeren, Wang Guoqiang, Liu Zhengbin, Cui Da*, Mao Yiwei. Domain generalization network based on inter-domain multivariate linearization for intelligent fault diagnosis. Reliability Engineering & System Safety 261 (2025): 111055. (1区,D刊)
[4] Cui, Da; Peers, Christopher; Wang, Guoqiang; Chen, Zeren; Richardson, Robert; Zhou, Cheng xu*; Human inspired fall arrest strategy for humanoid robots based on stiffness ellipsoid optimisation, Bioinspiration and Biomimetics, 2021, 16(5): 0-056014. (期刊论文,IF: 2.985)
[5] Cui, Da; Hudson, Samuel; Richardson, Robert; Zhou, Chengxu*; An Upper Limb Fall Impediment Strategy for Humanoid Robots, 21th Annual Conference on Towards Autonomous Robotics, TAROS 2020, Nottingham, United kingdom, 2020-9-16至2020-9-16. (会议论文,EI检索)
[6] Cui, Da; Wang, Guoqiang; Lu, Yanpeng; Sun, Kangkang; Reliability design and optimization of the planetary gear by a GA based on the DEM and Kriging model, Reliability Engineering & System Safety, 2020, 203: 0-107074. (期刊论文,IF: 5.372)
[7] Cui Da; Wang, Guoqiang; Zhao, Huanyu; Wang, Shuai; Research on a Path-Tracking Control System for Articulated Tracked Vehicles, Strojniski Vestnik-Journal of Mechanical Engineering, 2020, 66(5): 311-324. (期刊论文,IF: 1.6)
[8] Zhang, Haoyan, Wu Jiaqi, An Yang, Xie Pengshu, Cui Da*. Research on Trajectory-Tracking Control System of Tracked Wall-Climbing Robots. Sensors 24, no. 1 (2023): 144.
[9] Fang, Yi; Wang, Shuai; Cui, Da*; Bi, Qiushi; Jiang, Ruihua; Yan, Chuliang; Design and optimization of wall-climbing robot impeller by genetic algorithm based on computational fluid dynamics and kriging model, Scientific Reports, 2022, 12(1): 1-18. (期刊论文,IF: 4.996)
[10] Tian, He; Wang, Guoqiang; Sun, Kangkang; Chen, Zeren; Yan, Chuliang; Cui, Da*, Optimization and Design of Hammerheads and Fenders on Scrap Metal Shredders Based on Improved Genetic Algorithm, Shock and Vibration, 2021, 2021: 1196299.
[11] 谢朋书,崔达*,王国强,李凯.基于离散元的立式螺旋搅拌磨机工作性能.吉林大学学报(工学版):1-9[2023-03-04].
[12] 李莉佳,李虹瑞,杨士通,崔达*.残余应力对材料循环压痕响应的影响.吉林大学学报(工学版),1-11[2024-05-08].
学术成果(专利):
[1] 方毅,王国强,陈春思,崔达,解瑞,田鹤. 六履带准确转向控制系统[P]. 吉林省:CN208868132U,2019-05-17.
[2] 田鹤,王国强,杨锐鹏,崔达,鲁艳鹏,刑少杰,刘洋. 机械式挖掘机样机挖掘力测试试验台[P]. 吉林:CN207472471U,2018-06-08.
[3] 王国强,田鹤,杨锐鹏,崔达,鲁艳鹏,刑少杰,刘洋. 机械式挖掘机样机挖掘力测试试验台[P]. 吉林:CN107389251A,2017-11-24.
[4] 杨锐鹏,王国强,田鹤,崔达,刘洋,邢少杰,鲁艳鹏. 机械式挖掘机工作装置样机性能测试试验台[P]. 吉林:CN207197834U,2018-04-06.
[5] 王国强,陈春思,马若丁,崔达,李婧锡. 多信息融合路面谱实时测试系统和测试方法[P]. 吉林省:CN109596078A,2019-04-09.
指导学生:
大学生创新创业训练计划项目(国家级):焙道而行——面向浅烘咖啡的小载量节能咖啡烘焙机,2023~2024